


Vertical Handling Manipulator – VERtech
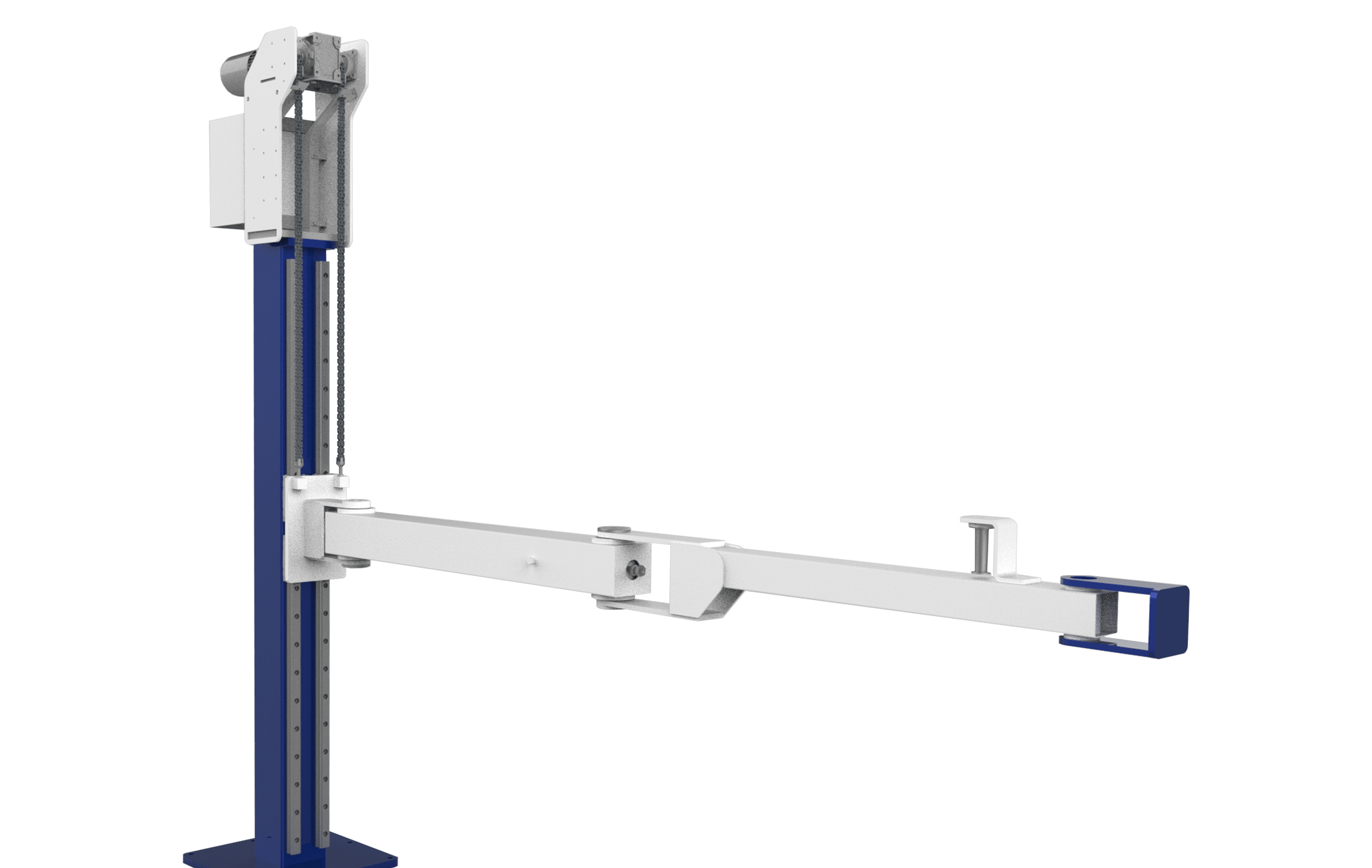
The manipulation / lowering kinematics of the manipulator and of the product itself is carried out by a vertical sliding system operated by two special chains with very high resistance, which in turn are maneuvered by an electric group with a fully automatic electronic balancing system. The integrated microprocessor instantly and continuously detects the weight of the lifted object and allows a continuous and automatic balancing of the manipulator in any position or configuration it is without the operator performing any additional adjustment as is often required in pneumatic manipulators. With the electronic manipulator the operator can lift and manipulate objects of different weights or that change in weight during the cycle phases (ex: emptying of drums, sacks or drums) in random sequence without having to perform any additional adjustment.
The electronic manipulator with articulated rigid arms allows the management of unbalanced loads and / or the interlocking of cantilevered positions not directly accessible from the vertical (ex: shelving or shelves).
The operator through the handle (customizable) or sensitive knob can move the product effortlessly and completely independent of the weight of the lifted article and the size of the manipulator itself, without having to act or press any selector or button. For the operator the handling of the load is absolutely natural and intuitive, avoiding the annoying effects of rebound and delays in the response of traditional pneumatic manipulators.
The electro-mechanical management of the high-strength chains eliminates the annoying rebounds that are typical of the spring effect in the air cylinders and consequently of the traditional pneumatic manipulators, allowing greater precision and delicacy in the movements and positioning of the objects.